การปฏิวัติโรงงานไร้คนขับ: เครนแบบคานคู่ + AGV เข้ามาแทนที่รถยกแบบดั้งเดิมได้อย่างไร?
1 บทนำ: ความเป็นมาและความจำเป็นของการเปลี่ยนแปลงสู่โรงงานไร้คนขับ
การผลิตสมัยใหม่กำลังก้าวข้ามจากระบบอัตโนมัติไปสู่ระบบอัจฉริยะ ซึ่งวิธีการจัดการวัสดุแบบดั้งเดิมกลายเป็นปัญหาสำคัญ สถิติแสดงให้เห็นว่าการใช้งานรถยกแบบดั้งเดิมมีระยะเวลาการทำงานเปล่าสูงถึง 40% และอัตราการทำซ้ำของเส้นทางเพียง 30% ซึ่งก่อให้เกิดการสูญเสียพลังงานและอันตรายด้านความปลอดภัย XCMG ระบุข้อจำกัดพื้นฐานสามประการ ได้แก่ ความเข้มข้นของแรงงานที่สูงซึ่งก่อให้เกิดปัญหาคอขวดด้านประสิทธิภาพ ความแม่นยำที่ไม่เพียงพอซึ่งรบกวนขั้นตอนการทำงาน และการใช้พื้นที่น้อยซึ่งเป็นข้อจำกัดในการปรับปรุงเค้าโครง
ภายใต้กลยุทธ์ “Made in China 2025” ของจีน ผู้ผลิตต้องการระบบโลจิสติกส์ที่ชาญฉลาดมากขึ้นอย่างเร่งด่วน รายงาน ESG ปี 2024 ของ XCMG ระบุว่า: “เปิดตัว ‘สามกลยุทธ์สำคัญ’ ได้แก่ การเปลี่ยนแปลงสู่ระบบอัจฉริยะ การเปลี่ยนผ่านสู่ระบบดิจิทัล และการสร้างเครือข่ายเพื่อสร้างผลผลิตที่มีคุณภาพใหม่” โดยเน้นย้ำถึงโลจิสติกส์อัจฉริยะที่เป็นหัวใจสำคัญของการผลิตอัจฉริยะ ด้วยเหตุนี้ ระบบความร่วมมือระหว่างเครนคานคู่และรถขนส่งอัตโนมัติ (AGV) จึงถือกำเนิดขึ้น ปฏิวัติการจัดการวัสดุด้วยเทคโนโลยีไร้คนขับ
โซลูชันนี้ช่วยเพิ่มประสิทธิภาพด้านโลจิสติกส์ได้มากกว่า 40% ลดต้นทุนแรงงานได้ถึง 80% และปรับปรุงความปลอดภัยและการใช้พื้นที่ได้อย่างมีนัยสำคัญ
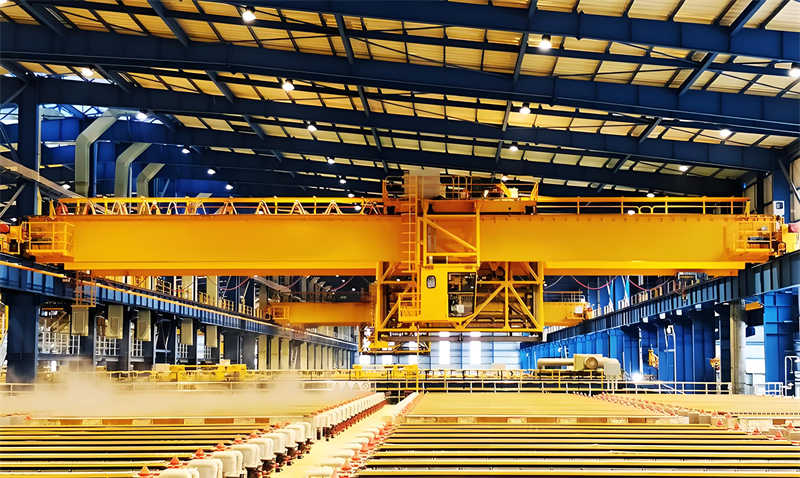
2 สถาปัตยกรรมทางเทคนิค: เครนคานคู่ + AGV Synergy
2.1 ความก้าวหน้าทางเทคโนโลยีในเครนคานคู่อัจฉริยะ
- ระบบควบคุมอัจฉริยะ:
- โมดูล PLC อุตสาหกรรม + IoT ช่วยให้สามารถควบคุมจากส่วนกลางได้
- ตู้ควบคุมแบบบูรณาการที่จดสิทธิบัตรของ XCMG ประมวลผลข้อมูลเซ็นเซอร์และเชื่อมต่อกับ MES ผ่านเครือข่ายอุตสาหกรรม 5G
- นวัตกรรมโครงสร้าง:
- การออกแบบคานกล่อง (ช่วงกว้างกว่า 40 เมตร แข็งแรง น้ำหนักเบา)
- มอเตอร์รอกควบคุมความถี่ (ความเร็ว: 0-20 เมตร/นาที)
- ระบบกระจายแบบแยกส่วน (ตะขอ/แม่เหล็กไฟฟ้าแบบเปลี่ยนเร็ว)
- การรับรู้หลายมิติ:
- เครื่องวัดระยะด้วยเลเซอร์ (ความแม่นยำ ±1 มม.)
- ระบบเรดาร์คู่ (เรดาร์ป้องกันการชนหลักและรอง)
- เครื่องสแกนภาพด้วยเลเซอร์สำหรับการสร้างแบบจำลอง 3 มิติ
- ตัวเข้ารหัสตำแหน่ง (ตำแหน่งเครน ±2 มม.; การหมุน ±0.5°)
ตาราง: พารามิเตอร์ทางเทคนิคที่สำคัญ
| โมดูล | ข้อมูลจำเพาะ | ข้อได้เปรียบ |
|---|---|---|
| ระบบควบคุม | โปรเซสเซอร์มัลติคอร์ + 5G | เวลาตอบสนอง <50ms |
| การวางตำแหน่ง | เลเซอร์ + เอนโคเดอร์ | ความแม่นยำ ±1 มม. |
| การรับรู้ | เรดาร์คู่ + เลเซอร์ 3 มิติ | การตรวจจับสิ่งกีดขวาง 0.5–15 เมตร |
| ระบบขับเคลื่อน | มอเตอร์ VFD + เบรกแบบสร้างพลังงานใหม่ | ลดการใช้พลังงาน 40% |
2.2 คุณสมบัติของแพลตฟอร์ม AGV
- ระบบนำทางหลายทิศทาง (LIDAR SLAM/คิวอาร์โค้ด/เทปแม่เหล็ก)
- ระบบจัดตารางเวลาส่วนกลางที่ขับเคลื่อนด้วย AI
- โครงรองรับที่ยืดหยุ่น (ความจุ 0.5–10 ตัน)
- ระบบป้องกันความปลอดภัย 360°
2.3 ความร่วมมือระหว่างเครนและ AGV
ดำเนินงานผ่านสถาปัตยกรรม Cloud-Edge-Device:
- คลาวด์: การสร้างงานจาก MES/ERP
- Edge: การจัดสรรงานแบบเรียลไทม์:
- เครนรองรับการเคลื่อนที่ในแนวตั้ง (สถานีจัดเก็บระดับสูง ↔ สถานีถ่ายโอน)
- AGV จัดการการขนส่งในแนวนอน (สถานีถ่ายโอน ↔ สถานีทำงาน)
- อุปกรณ์:
- แผงควบคุมเครนสื่อสารกับ AGV
- AGV ดำเนินงานภายใน 10 วินาทีหลังจากได้รับสัญญาณ
3 ข้อดีเมื่อเทียบกับรถยกแบบดั้งเดิม
3.1 ประสิทธิภาพและผลผลิต
- การทำงานตลอด 24 ชั่วโมงทุกวัน (ไม่มีข้อจำกัดเรื่องกะ)
- ลดเวลาการทำงานลง 150% (6 นาที เทียบกับ 15 นาที)
- เปลี่ยนสายด้วย Digital Twin (15 นาที เทียบกับ 2 ชั่วโมง)
3.2 ความปลอดภัยและความน่าเชื่อถือ
- การป้องกันเชิงรุก:
- ระบบป้องกันการชนกันของเครนด้วยเรดาร์คู่
- ระบบตรวจจับสิ่งกีดขวาง 360° ของ AGV
- ความแม่นยำ:
- ตำแหน่งเครน: ±2 มม.; AGV: ±5 มม. (เทียบกับรถยก: ±50 มม.)
- ลดอุบัติเหตุได้มากกว่า 95%
3.3 การเพิ่มประสิทธิภาพต้นทุนและพื้นที่
- ประหยัดต้นทุน:
- ลดแรงงาน 80%
- ลดค่าบำรุงรักษา 60% (เมื่อเทียบกับรถยก ICE)
- ประหยัดพลังงาน 40% (ระบบเบรกแบบ regenerative)
- ประสิทธิภาพการใช้พื้นที่:
- เครนใช้พื้นที่เหนือศีรษะ (ความสูง 5–15 เมตร)
- ทางเดินรถยกอัตโนมัติ (AGV) แคบกว่าทางเดินรถยก 30%
- เพิ่มความหนาแน่นของพื้นที่จัดเก็บมากกว่า 50%
ตาราง: การเปรียบเทียบระหว่างรถยกกับโซลูชันอัจฉริยะ
| เมตริก | รถยก (Forklift) | เครน+AGV (Crane+AGV) | การปรับปรุง |
|---|---|---|---|
| เวลาการทำงาน | 15 mins | 6 mins | 150% |
| แรงงาน/กะ | 2 ผู้ปฏิบัติงาน | 0 | 100% |
| อัตราการเกิดอุบัติเหตุ | 0.8/10k hrs | <0.04/10k hrs | 95% |
| การใช้ประโยชน์พื้นที่ | ชั้นเดียว | หลายระดับ | 50%+ |
| การใช้พลังงาน | ดีเซล/แบตเตอรี่ | ไฟฟ้า + รีเจน | 40% |
3.4 ความยั่งยืน
- การทำงานด้วยไฟฟ้าล้วน + ระบบเบรกแบบ regenerative
- การจัดการพลังงานอัจฉริยะ: การชาร์จนอกช่วงพีค, การเพิ่มประสิทธิภาพเส้นทาง
- วัสดุที่เป็นมิตรต่อสิ่งแวดล้อม: เหล็กกล้าความแข็งแรงสูง (เครน), อะลูมิเนียม (AGV)
4 แผนงานการดำเนินงาน
4.1 การประเมินและการวางแผน
- ตรวจสอบขั้นตอนการทำงาน สภาพแวดล้อม และปริมาณงานด้านโลจิสติกส์
- ออกแบบอุปกรณ์ต่อพ่วงเครน (อุปกรณ์จับยึด/แม่เหล็กไฟฟ้า) และทางเดินรถขนส่งอัตโนมัติ (AGV)
4.2 การปรับใช้โครงสร้างพื้นฐาน
- เสริมความแข็งแรงรางเครน ทำเครื่องหมายเลน AGV
- ติดตั้งเครน ระบบนำทาง เครือข่าย 5G/WiFi
- ปรับเทียบเซ็นเซอร์ (เรดาร์ เลเซอร์อิมเมจเจอร์)
4.3 การบูรณาการและการทดสอบ
- เชื่อมต่อระบบควบคุมเครน/AGV เข้ากับ MES/WMS
- กำหนดค่ากฎงาน โปรโตคอลข้อยกเว้น
- จำลองสถานการณ์: อุปกรณ์เดียว → การทำงานร่วมกัน → การทดสอบความเครียด
4.4 การฝึกอบรมและการปฏิบัติการบิน
- ยกระดับทักษะพนักงาน: ผู้ปฏิบัติงาน (ฝ่ายตรวจสอบ) ช่างเทคนิค (ฝ่ายบำรุงรักษา)
- การเปิดตัวแบบค่อยเป็นค่อยไป: การทดลองใช้งานในเวลากลางวัน → ขยายเวลา → ปรับใช้เต็มรูปแบบ
4.5 การปรับปรุงอย่างต่อเนื่อง
- วิเคราะห์ข้อมูลประสิทธิภาพ/พลังงาน
- อัปเกรดซอฟต์แวร์/ฮาร์ดแวร์ (เช่น เครื่องกระจายสินค้าใหม่)
ตาราง: ไทม์ไลน์การดำเนินการ
| เฟส | งานหลัก | ระยะเวลา | ตัวชี้วัดความสำเร็จ |
|---|---|---|---|
| การวางแผน | การตรวจสอบ, การสร้างแบบจำลอง 3 มิติ | 4–8 สัปดาห์ | การจำลองเสร็จสมบูรณ์ |
| การปรับใช้ | การติดตั้ง, การทดสอบ | 8–12 สัปดาห์ | ผ่านการทดสอบการไม่โหลด |
| การบูรณาการ | การเชื่อมโยงระบบ ปรับแต่ง | 4–6 สัปดาห์ | 10+ รอบการทำงานร่วมกัน |
| นักบิน | การฝึกอบรม การเปิดตัวแบบเป็นระยะ | 8–12 สัปดาห์ | การทำงานไร้ข้อผิดพลาด 7 วัน |
| การเพิ่มประสิทธิภาพ | การวิเคราะห์ข้อมูล การอัพเกรด | กำลังดำเนินการอยู่ | ประสิทธิภาพเป้าหมาย 120% |
5 การประยุกต์ใช้ในอุตสาหกรรม
5.1 การผลิตยานยนต์
- กระบวนการ: เครนเคลื่อนย้ายแผงตัวถังจาก AS/RS → AGV ขนส่งไปยังสถานีเชื่อม
- ผลลัพธ์: ประสิทธิภาพเพิ่มขึ้น 120%; ลดงานระหว่างทำ (WIP) ลง 45%; อุบัติเหตุเป็นศูนย์
5.2 การจัดการคอนเทนเนอร์ท่าเรือ
- ระบบ: เครนราง (เรือ ↔ ฝั่ง) + AGV (ฝั่ง ↔ ลานจอด)
- เทคโนโลยี: ระบบวิชันซิสเต็ม (เครน), ระบบกำหนดตำแหน่งเป่ยโต่ว (AGV)
- ผลลัพธ์: ตู้คอนเทนเนอร์มากกว่า 35 ตู้ต่อชั่วโมงต่อเครน; ประหยัดพลังงาน 40%; ลดแรงงาน 60%
5.3 การผลิตแบตเตอรี่ลิเธียม
- โซลูชัน: เครนป้องกันการระเบิด + AGV ในห้องคลีนรูม
- คุณค่า: ขจัดความเสี่ยงที่เกิดจากมนุษย์ และรักษาความสะอาดระดับ Class 1000
6 แนวโน้มอนาคต
6.1 วิวัฒนาการอัจฉริยะ
- ระบบอัจฉริยะแบบกลุ่ม: การประสานงานเครน-AGV แบบกระจายศูนย์
- ฝาแฝดดิจิทัล: การบำรุงรักษาเชิงคาดการณ์ (การแจ้งเตือนล่วงหน้า 2 สัปดาห์)
- การตัดสินใจอัตโนมัติ: การกำหนดเส้นทางแบบไดนามิกด้วย AI, การจับยึดแบบปรับได้
6.2 การผลิตสีเขียว
- การบูรณาการพลังงานหมุนเวียน: ซูเปอร์คาปาซิเตอร์ (เครน), เซลล์เชื้อเพลิงไฮโดรเจน (AGV), พลังงานแสงอาทิตย์
- วัสดุที่ยั่งยืน: เครนมีน้ำหนักเบาลง 15–20%; ส่วนประกอบ AGV รีไซเคิล 40%
6.3 ผลกระทบต่อระบบนิเวศ
- รูปแบบธุรกิจใหม่: โลจิสติกส์แบบบริการ (LaaS), AGV ที่ใช้ร่วมกัน
- การเปลี่ยนแปลงกำลังคน: ผู้ควบคุมรถยก → หัวหน้างานระบบ; ผู้ประสานงานหุ่นยนต์
เอกสารที่แปลแล้วนี้ยังคงรายละเอียดทางเทคนิค ข้อกำหนดกรรมสิทธิ์ (เช่น สิทธิบัตรของ XCMG) และจุดข้อมูลทั้งหมดไว้ โดยปรับให้เข้ากับภาษาอังกฤษมาตรฐานอุตสาหกรรม โครงสร้างนี้ช่วยให้ทีมวิศวกรรมและจัดซื้อทั่วโลกสามารถประเมินโซลูชันการจัดการวัสดุอัจฉริยะได้อย่างชัดเจน
